

传感百科-静力水准仪
静力水准仪
概述
静力水准系统是测量两点间或多点间相对高程变化的精密仪器。主要用于大型储罐、大坝、核电站、高层建筑、基坑、隧道、桥梁、地铁等垂直位移和倾斜的监测。静力水准系统一般安装在被测物体等高的测墩上或被测物体墙壁等高线上,通常采用一体化模块化自动测量单元采集数据,通过有线或无线通讯与计算机连接,从而实现自动化观测。
属于高精度在线变形监测系统,系统支持自动化组网传输。
防护等级:IP67
产品技术
静力水准仪是一种高精密液位测量系统,该系统适用于测量多点的相对沉降。在使用中,多个静力水准仪的容器用通液管联接,每一容器的液位由磁致伸缩式传感器测出,传感器的浮子位置随液位的变化而同步变化,由此可测出各测点的液位变化量。在静力水准仪的系统中,所有各测点的垂直位移均是相对于其中的一点(又叫基准点)变化,该点的垂直位移是相对恒定的或者是可用其它方式准确确定,以便能精确计算出静力水准仪系统各测点的沉降变化量,伸缩式静力水准仪采用的传感器是利用磁致伸缩原理开发出的新一代高精度液位测量产品,是一种非接触式液位测量传感器。该传感器具有高分辨率、高精度、高稳定性、高可靠性、响应时间快,工作寿命长等优点。特点:直线测量,绝对位置输出,非接触式连续测量,永不磨损,防护等级IP65。传感器不用重新标定,也不用定期维护,输入/输出多种选择,可选择电压、电流模拟信号输出,RS485数字信号输出。安装简单方便与其它液位变送器和液位计相比有明显的优势。
用途
静力水准仪是用于测量基础和建筑物各个测点的相对沉降的精密仪器。主要用于大型建筑物如水电站厂、坝、高层建筑物、核电站、水利枢纽工程岩体等各测点不均匀沉降的测量。产品内置锂电池使用寿命可达1年以上电池可更换,并且支持多种供电方式、5v~24v 、220v产品,内置无线GPRS无线模块,可实现自动化无线通信。可直接连接互联网实现物联网的功能,通过web软件实现远程访问监控以及云存储以及数据共享。
产品特点
静力水准仪的特点:
1.采用有机玻璃管作为贮液容器,透明度好,可以直观的反应容器内液面的高度便于目测。
2.上下端盖采用铝合金材料制成,表面氧化发黑处理,及轻便又防锈。
3.传感器采用全不锈钢制造永不生锈,外部全封闭式结构,防水性能好。
4.传感器安装采用螺纹连接固定,无需其它附件,及简单又牢靠。
5.上端盖或底板上装有水平泡,便于仪器的安装调平。
6.安装架装有3套调节螺栓对仪器底板形成3点支撑,便于仪器的安装调平
7.安装架适用在测墩和墙壁安装,无需增加附件,固定简单方便。
安装说明(以三支300mm传感器为例)
1、将两支传感器安放在被测沉降点。
2、将另一支传感器安放在基准水位点,基准水位点必须为不沉降点。基准水位点的高层需要比被测沉降点高层低100mm-150mm。
3、将导压水管裁剪至适当长度,紧固在静力水准仪下方出水口的三通处。沿途整理导压水管,使三支传感器保持良好串联,可使溶液安全、无阻、无泄漏的相互流通。
4、旋开基准水位点处传感器的铝合金上封盖(铝合金与有机玻璃的螺旋部分),将SG 溶液加入有机玻璃缸内。
5、调节三支传感器液面,以基准水位点传感器的浮球浮在最顶端(注:浮球顶部不要触顶壁),沉降点传感器的浮球刚刚浮起5-10mm为宜。
6、调好液面高层后,在传感器安放位置打入8mm膨胀螺丝。安放传感器,并紧固。微调调节螺母,可使传感器保持竖直,或微调传感器高层。(附件中的6mm膨胀螺丝,在传感器安装到垂直墙壁上时才用的到)
7、将细导管裁剪至20cm左右,安装在传感器上方通气三通处,以防雨水、泥沙进入传感器缸体内。
注:1、导压水管裁剪的刀口处要齐平。
2、将导压水管端口处用力插入三通内(到位时有感触),即可牢固卡紧。
3、欲将紧固的导压水管从三通中取出,只需沿轴向向内按压三通蓝色压帽的同时,轻轻拔出导压水管即可。
4、SG溶液为固定配比的防冻防蒸发溶液,改变溶液中纯净水的配比,不会影响传感器精度,但会影响防护效果。
静力水准的观测计算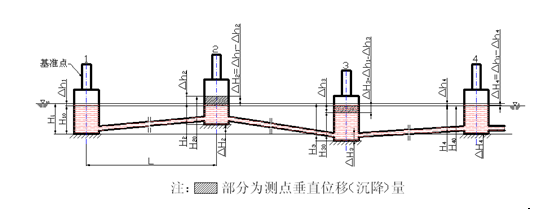
1、静力水准仪基准点液位变化量△hj(mm)可按下列公式计算:
△hj=Kj(Fj-Foj)
在此:Kj—静力水准仪基准点传感器系数(mm/F)
Fj—静力水准仪基准点的当前读数(F)
Foj—静力水准仪基准点的初始读数(F)
2、静力水准仪各观测点液位变化量△hi(mm)可按下列公式计算:
△hi=Ki(Fi-Foi)
在此:Ki—静力水准仪观测点传感器系数(mm/F)
Foi—静力水准仪观测点的初始读数(F)
Fi—静力水准仪观测点的当前读数(F)
3、各观测点沉降或抬高的变化量△Hi(mm)可按下列公式计算:
△Hi=△hj-△hi =Kj(Fj-Foj)-Ki(Fi-Foi)
注:1、计算的物理量符号,正值为液位上升,负值为液位下降。
2、△Hi为正值表示测点上浮,负值表示测点沉降。
3、单支传感器参数,如K值等,详见传感器合格证。
4、在计算时,请注意统一各参数的数量级、单位。

